

Projekt
Die
Mission
Die Landwirtschaft der Zukunft soll effizienter und nachhaltiger sein. Schon heute können Anbausysteme durch den Einsatz hoch flexibler autonomer Feldroboter immer kleiner und abwechslungsreicher gestaltet werden — es entstehen diversifizierte Agrarlandschaften. Ziel ist es, in diesen Landschaften die Auswirkungen der Landwirtschaft auf den Boden im Vergleich zur konventionellen Landwirtschaft zu verringern. Eine geringere Bodenbelastung ermöglicht eine gesteigerte Bodengesundheit. Gesunde Böden sind wiederum die Basis für eine ertragreiche Landwirtschaft, die auch in Zukunft fortbestehen kann.
SoilRob verfolgt also eine ambitionierte Mission: Die Steigerung der Bodengesundheit durch den Einsatz von autonomen Feldrobotern in diversifizierten Agrarlandschaften. SoilRob strebt dabei die Vorreiterrolle bei der Gestaltung, Implementierung und Bewertung von vielfältigen und bodengesunden Agrarlandschaften der Zukunft an.

Bodengesundheit
Steigerung der Bodengesundheit in Agrarlandschaften
Diversifizierung
Diversifizierung von Agrarlandschaften
Digitalisierung
Einsatz digitaler Tools in der Landwirtschaft
Landwirtschaft der Zukunft
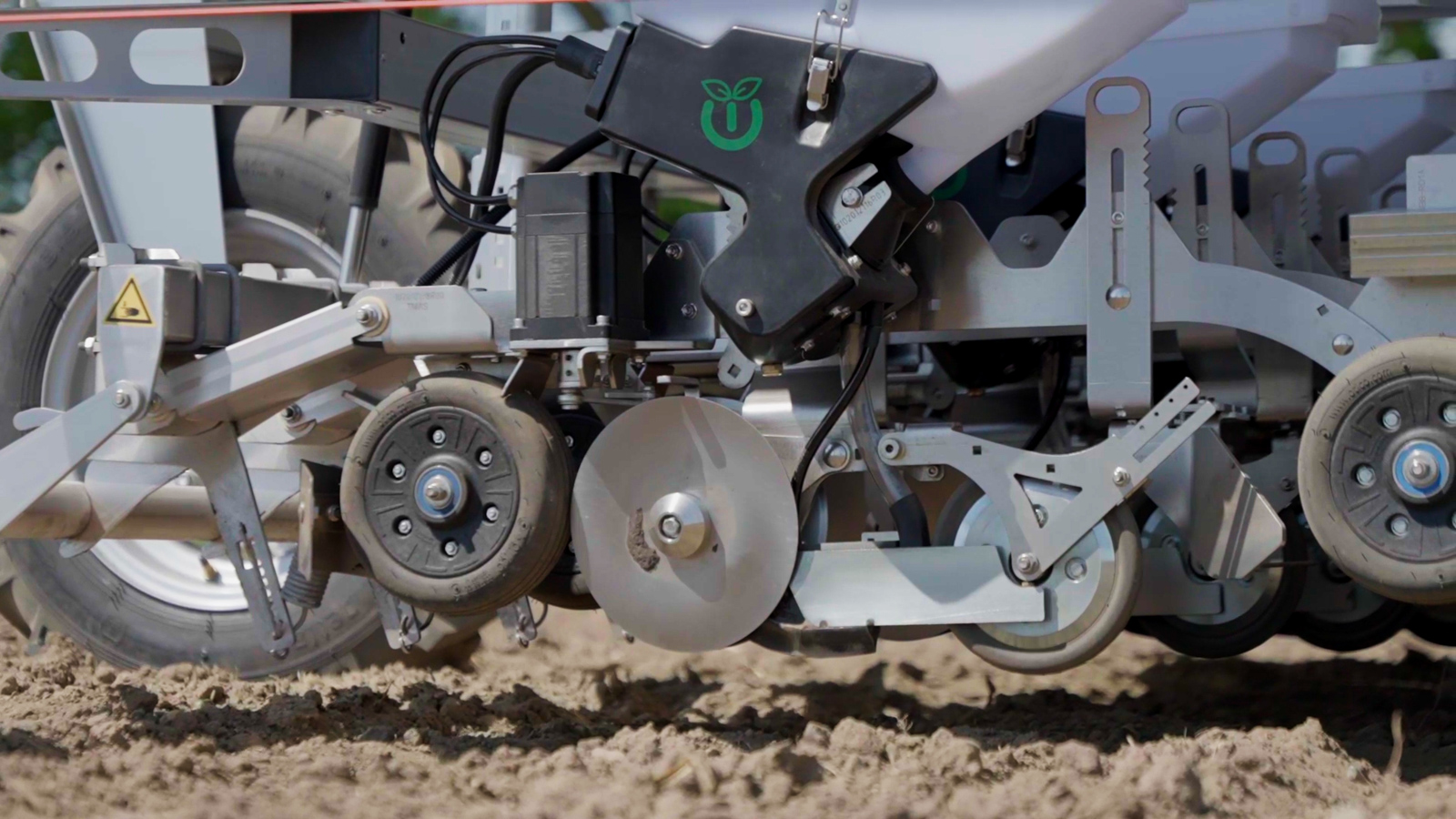
Einsatz autonomer Feldroboter
Der
Ablauf
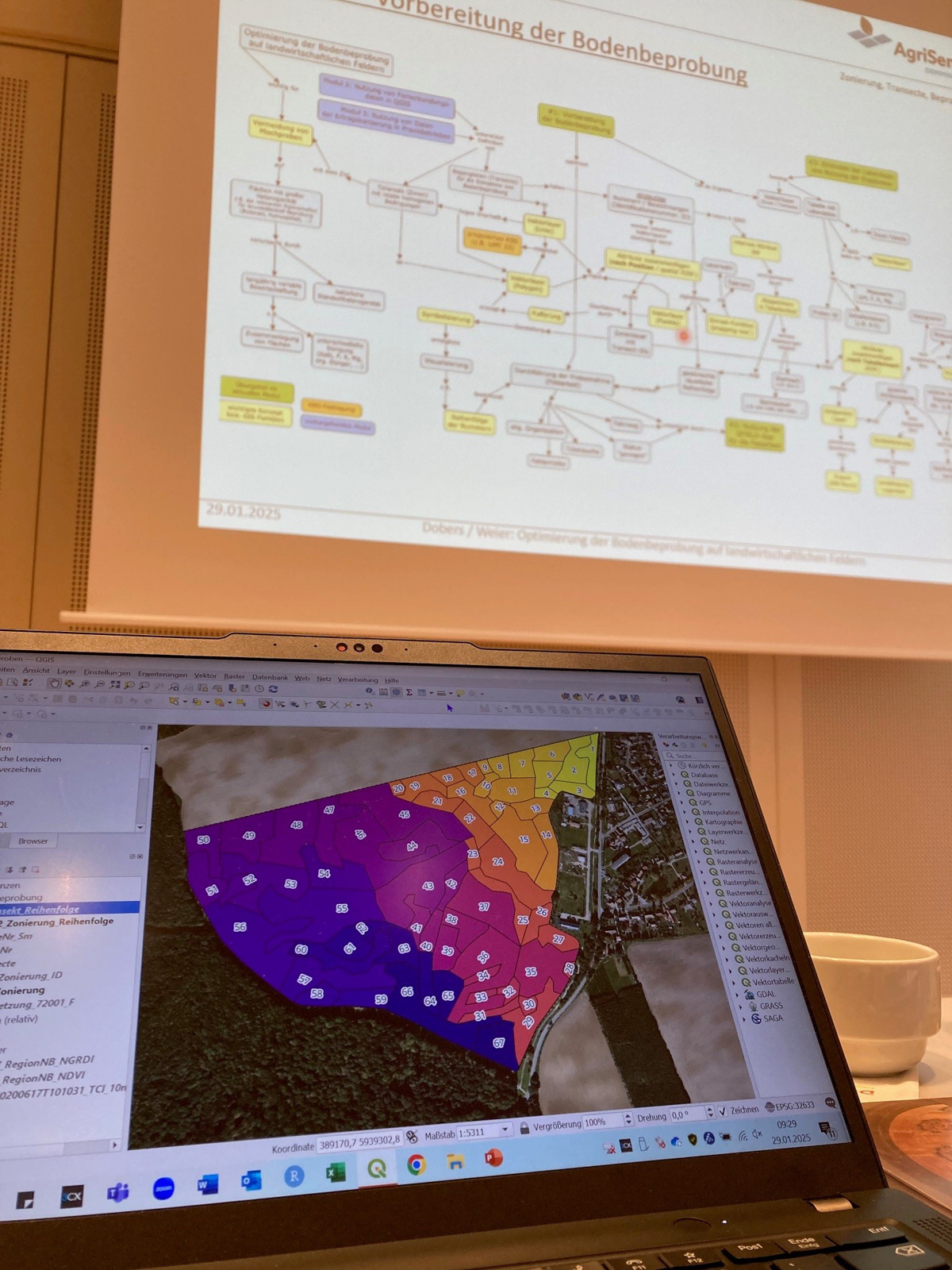
Die Umsetzung der in SoilRob angestrebten wissenschaftlichen Ziele erfolgt in drei Arbeitspaketen. Dabei werden in Arbeitspaket 1 zunächst umfangreiche, hochaufgelöste Messungen verschiedener Bodenparameter im Landschaftslabor patchCROP durchgeführt. Die daraus resultierenden Daten dienen dann der Erstellung eines Katalogs an Bodengesundheits- und Pflanzenproduktivitätsindikatoren. Dieser Katalog wird umfassend analysiert und bewertet, um darauf basierend eine Auswahl aussagekräftiger Indikatoren zu treffen. Mit diesem Bodengesundheitsinstrument sollen dann im zweiten Arbeitspaket deutschlandweit mit Feldrobotern bewirtschaftete Anbausysteme untersucht und bewertet werden.
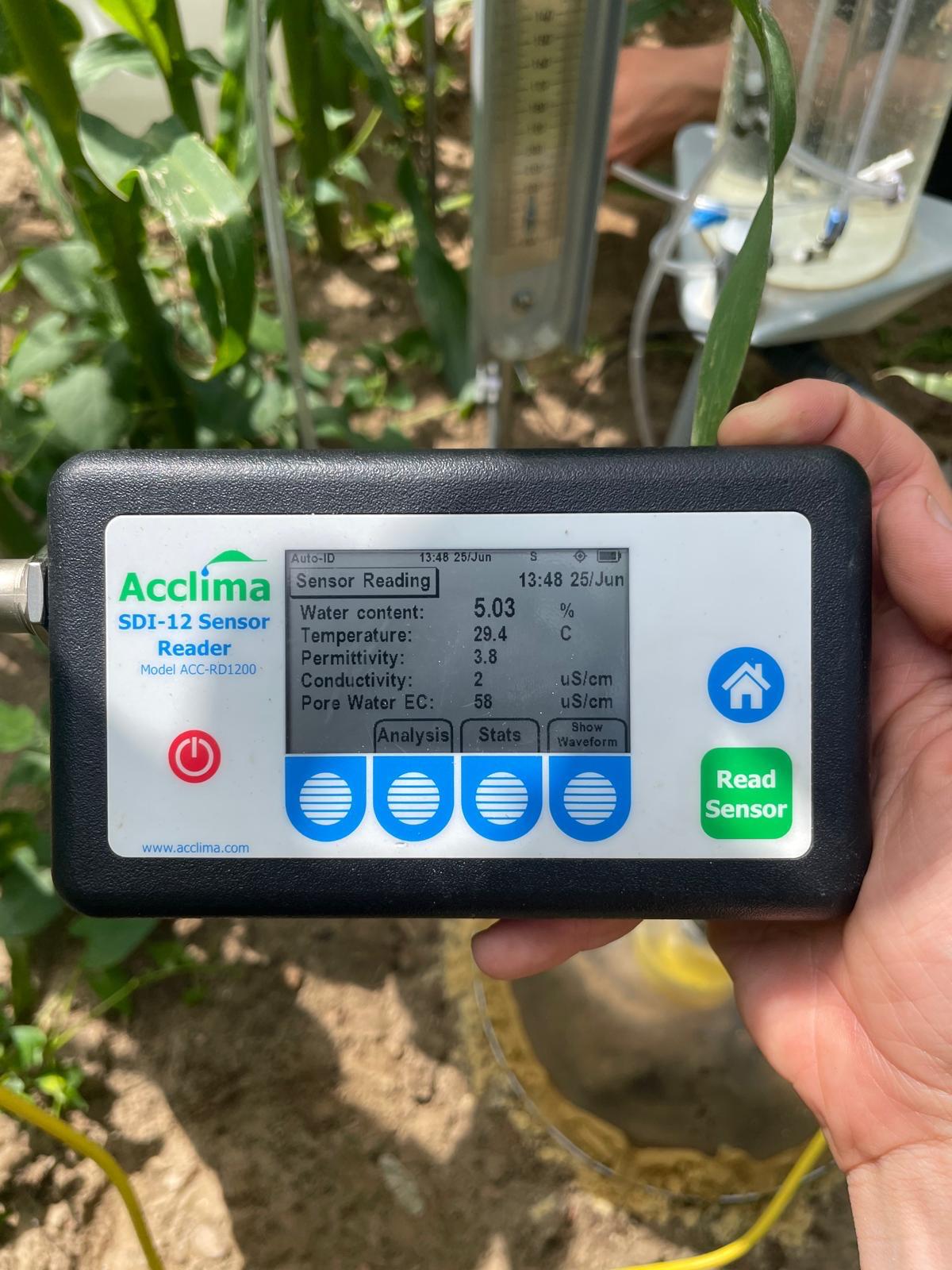
Die verschiedenen Standorte der Projektpartner stellen in Kombination mit den unterschiedlichen standortspezifischen Bodentypen und Kulturarten auch einen Gradienten des Ertragspotentials dar: In Bayern und Niedersachsen liegt ein hohes, in Sachsen ein mittleres und in Brandenburg ein niedriges Ertragspotential vor. Diese Satellitenversuche bieten die Möglichkeit, die Einflüsse verschiedene Robotermodelle an verschiedenen Standorten und Ackerkulturen unter realen Bedingungen zu vergleichen und standortspezifische Zielkonflikte für den Einsatz der Roboter zu identifizieren. Im dritten Arbeitspaket wird anschließend ein Digitaler Zwilling der Landschaftsversuche erschaffen. Mittels innovativer Sensorik werden Bodeneigenschaften auf dem Feld digitalisiert, um dann als Grundlage für die visuelle Simulation im Landwirtschaftssimulator zu dienen. Auf dieser Basis können dann Modelle für die Auswirkungen der Feldroboter auf den Boden erstellt werden.

Umfassende Bodenuntersuchungen
- Bodenbasierte Ökosystemdienstleistungen mit Robotik
- Integriertes Bodengesundheitsinstrument
- Langzeiterhebungen
Skalierung von Bodengesundheit
- Anwendung selektiver Indikatoren
- Standortspezifische Bewertung
- Feldroboterspezifische Auswirkungen

Visuelle Simulation
- Innovative Sensorik
- Landwirtschafts-Simulator
- Digitaler Zwilling
Die Ziele
Das Projekt kann auf verschiedenen Wegen einen Beitrag zur Erreichung mehrerer Nachhaltigkeitsziele („Sustainable Development Goals“, SDGs) der Vereinten Nationen beitragen. Zum einen soll aufgezeigt werden, wie der Einsatz der autonomen Feldroboter und die dadurch ermöglichte räumliche Diversifizierung der Agrarlandschaft, verschiedene (bodenbasierte) Ökosystemdienstleistungen fördern kann. Zum anderen wird im Projekt durch Wissenstransfer und Öffentlichkeitsarbeit ein wichtiger Beitrag zu einer nachhaltigeren Bewirtschaftung und zur regionalen Transformation von Anbausystemen geleistet.
Leben an Land
- Förderung der Artenvielfalt
- Diversifizierung von Agrarlandschaften zur Erhöhung der ÖSL
Maßnahmen zum Klimaschutz
- Quantifizierung des Einflusses auf den Bodenkohlenstoff
- Roboterantrieb mit erneuerbaren Energien

Ernährung sichern
- Stabile Erträge durch diverse Ackerkulturen und Fruchtfolgen
- Optimierung der Stickstoffbilanz
Sauberes Wasser
- Verbesserung der Bodenstruktur erhöht Infiltration und Wasserspeicherung
- Verringerung der Nitrateinträge durch angepasste Düngung
Nachhaltige(r) Konsum und Produktion
- Reduktion synthetischer Pestizide durch mechanische Unkrautkontrolle
- Gezielte Öffentlichkeitsarbeit und Wissenstransfer
Versuchs-
standorte
Die Versuche in SoilRob verteilen sich auf drei Standorte in Deutschland. Das Landschaftslabor patchCROP, in dem die Untersuchungen des Arbeitspakts 1 stattfinden, liegt in Tempelberg (Brandenburg) und damit in der Nähe zum ZALF (Müncheberg, Brandenburg). Die Satellitenversuche aus Arbeitspaket 2 finden am Institut für Zuckerrübenforschung in Göttingen (Niedersachsen) undauf dem Gelände des Future Crop Farming-Versuches der Landesanstalt für Landwirtschaft in Ruhstorf a.d. Rott (Bayern) statt.

Partner-
einrichtungen
HOCHSCHULE OSNABRÜCK
Experimentierfeld Agro-Nordwest

ATB
Leibnitz-Institut für Agrartechnik und Bioökonomie

Leibniz-Innovationshof
für nachhaltige Bioökonomie

INSTITUT FÜR ZUCKERRÜBENFORSCHUNG
Experimentierfeld FarmerSpace

TECHNISCHE UNIVERSITÄT DRESDEN
Experimentierfeld Landnetz

BAYERISCHE LANDESANSTALT FÜR LANDWIRTSCHAFT
LfL-Standort Ruhstorf-Kleeberg




































































BILL GATES
"We should discuss soil as much
as we talk about coal"
LEONARDO DA VINCI
"We know more about the movement of celestial bodies than about the soil underfoot."
Franklin D. Roosevelt
"The nation that destroys its soil destroys itself."
Charles E. Kellogg
"Essentially, all life depends upon the soil"
Mahatma Gandhi
"To forget how to dig the earth and to tend the soil is to forget ourselves."
William Bryant Logan